
www.technologieenindustrie.com
11
'22
Written on Modified on
Autonome navigatie, tot op de millimeter nauwkeurig
Met de opkomst van het Internet of Things (IoT) en de Industrie 4.0 wordt intralogistiek steeds belangrijker. Nauwkeurig transport van goederen en materialen wordt één van de belangrijkste factoren voor een efficiënte productie. De mobiele transportsystemen van Evocortex voeren deze taak uit op een unieke manier. Een doorslaggevende factor voor dit creatieve technische concept: de vermogensdichtheid van de FAULHABER-motoren die het bedrijf inzet.

Productie betekent tegenwoordig complexiteit. Er wordt steeds vaker geproduceerd volgens de unieke specificaties van individuele klanten. Integraties in het Internet of Things maken zelfs volledig geautomatiseerde productie mogelijk voor afzonderlijke items met een oplage van één. Die vele varianten vragen om nauw verweven processen, die tegelijkertijd heel flexibel moeten zijn. De juiste onderdelen en componenten moeten op het juiste moment klaar liggen bij de verschillende stations in de productielijn – in een ongekend aantal variaties.
AMR in opkomst
Het transport van die materialen, bijvoorbeeld tussen de aanlevering en de productiesystemen, wordt steeds individueler. Toch moet het nog steeds zoveel mogelijk geautomatiseerd verlopen. Magazijnen en fabriekshallen wereldwijd zetten daarom steeds meer in op mobiele robotplatformen: Autonomous Mobile Robots, afgekort tot AMR.
De start-up Evocortex in het Duitse Nürnberg, in 2016 opgericht met ervaren robotexperts aan boord, richt zich specifiek op deze markt. Het bedrijf is nauw verbonden met de nabijgelegen Technische Hochschule Nürnberg en andere instellingen voor onderzoek en onderwijs, en het heeft een volledig nieuw AMR-concept op de markt gebracht. De producten van het bedrijf vormen creatieve en innovatieve oplossingen voor de vereisten binnen de moderne intralogistiek.
Hubert Bauer, Managing Director van Evocortex: "Voor conventionele AMR's moet de ruimte vaak worden aangepast op de paden die ze afleggen, of ze vereisen zelfs technische wijzigingen in de processen. Denk aan de optische markeringen die de voertuigen nodig hebben voor hun oriëntatie, maar ook specifieke afmetingen voor de paden en kruisingen en de straal van een bocht. Wij wilden daarentegen transportrobots bouwen die zich aanpassen aan de klant, in plaats van andersom."

Vingerafdrukken van de vloer om de exacte positie te bepalen
De autonome mobiele robots (AMR's) van Evocortex hebben geen enkel vooraf geïnstalleerd gidssysteem nodig om hun locatie te bepalen en de weg te vinden. Ze oriënteren zichzelf op basis van onregelmatigheden in de vloer van de fabriekshal of het magazijn. Zelfs gladde betonoppervlakken hebben dit soort onregelmatigheden, en de camera van de robot registreert deze met hoge resolutie. De camera bevindt zich aan de onderkant van het voertuig en filmt een gebied van 10 x 10 centimeter. Op basis van de beelddata genereert de robot vervolgens het equivalent van een vingerafdruk van de vloer. Het ingenieuze systeem werkt op basis van de Localization Module (ELM), die Evocortex zelf heeft ontwikkeld.
Voor het initiële inleerproces beweegt de robot in een roosterpatroon door de hal. Met behulp van complexe algoritmes wordt een extreem nauwkeurige kaart gemaakt van een patroon van individuele punten. In de toekomst wordt dit proces ook uitgevoerd met zelflerende kunstmatige intelligentie. Daarnaast detecteert de controller ook de eigen bewegingen van het voertuig. Door de gegevens te combineren is een positionering tot op de millimeter mogelijk, op een theoretisch oppervlak van een vierkante kilometer. Hiervoor hoeft het systeem slechts drie punten te identificeren. Zelfs als de helft van de vloer bedekt is met zaagsel, blijft de ELM werken en de betrouwbare en nauwkeurige navigatie garanderen. Nieuwe, blijvende krassen in de vloer worden toegevoegd aan de kaart, en na een bepaalde tijd worden kenmerken die verdwenen zijn ook weer verwijderd.
Optioneel kunnen de AMR's worden uitgerust met extra LIDAR-sensoren aan één of twee kanten. Deze sensoren scannen de ruimte in de rijrichting en detecteren obstakels – ook als die bewegen, bijvoorbeeld wanneer mensen het pad van de robot oversteken. Het voertuig stopt dan onmiddellijk om de veiligheid te garanderen.

Onbeperkte mobiliteit met Mecanum-wielen
Een normaal wiel beweegt alleen in dezelfde richting als zijn as. Voor de nauwkeurige positionering van een voertuig moet dan worden gemanoeuvreerd, zoals bij het parkeren van een auto. Om dit te voorkomen, kozen de ontwikkelaars van Evocortex voor het Mecanum-wiel. Deze wielen hebben geen gesloten loopvlak. In plaats daarvan zijn hier rollen gemonteerd onder een hoek van 45 graden ten opzichte van de wielas, die om hun eigen gelagerde as kunnen draaien. De vorm, het formaat en de tussenruimtes tussen de rollen zijn zo gekozen dat het wiel een doorlopend rolvlak heeft.
Als het Mecanum-wiel draait, ontstaan twee krachtcomponenten: in de draairichting van het gehele wiel, en in een loodrechte hoek op de die draairichting. Het resultaat is een beweging in de richting ertussen: het Mecanum-wiel zal geneigd zijn om zich onder een hoek van 45 graden ten opzichte van de axiale richting te verplaatsen. Omdat de rollen echter beweeglijk zijn, heeft het wiel geen richtingsstabiliteit. Als er extra krachten worden uitgeoefend, kan de richting van de beweging willekeurig worden afgebogen.
Bij een voertuig met vier Mecanum-wielen zijn alle hoeken van 45 graden met een offset van 90 graden geconfigureerd. Dat betekent dat ieder wiel in een andere richting zal bewegen. Door de draairichting en snelheid van de afzonderlijke wielen aan te passen, kan het voertuig vanuit stilstand in alle richtingen worden gestuurd of op de plaats draaien. Op een horizontaal vlak kan het voertuig dus volledig vrij bewegen. Dankzij de Mecanum-wielen kunnen de transportrobots van Evocortex zich zo flexibel in alle richtingen verplaatsen.
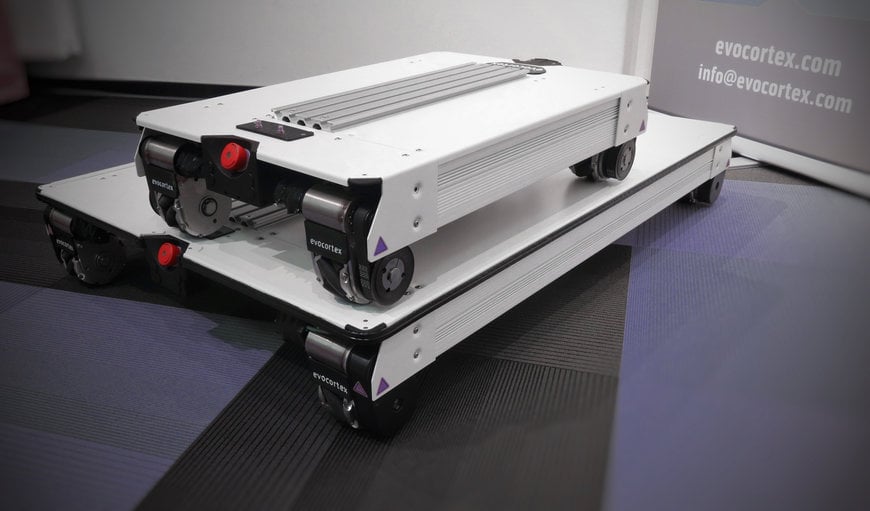
De AMR's van Evocortex zijn ook op een ander vlak heel flexibel: ze zijn in vrijwel onbeperkte formaten leverbaar. Huber Bauer benadrukt de mogelijkheden: "Indien gewenst kunnen we onze robot in stappen van een millimeter aanpassen aan de behoeften van onze klanten. Alle buitenafmetingen tussen 400 x 480 en 800 x 1200 millimeter kunnen we realiseren." Bij de productlijnen EvoRobot R&D en EvoRobot Industrial komen deze maten ook ongeveer overeen met de afmetingen van het dragende platform. Alle technologie – sensor, controller, hefeenheid en wielaandrijvingen – bevindt zich onder het platform.
De aandrijfmodule voor de wielen is een doorslaggevend element voor deze flexibele schaalbaarheid. Hij bevindt zich direct boven het wiel en vormt samen met het wiel een gestandaardiseerde, onafhankelijke functionele eenheid. Hierdoor kunnen de wielen op een willekeurige afstand van elkaar worden geplaatst. De belangrijkste vereiste hiervoor is een krachtige motor met een bijzonder klein formaat.
Hubert Bauer vertelt over de ontwikkelingsfase: "We hebben heel goed gekeken welke motoren op de markt geschikt konden zijn voor deze toepassing. Alleen FAULHABER kon de benodigde vermogensdichtheid leveren. Bij de motoren van andere leveranciers was er geen ruimte meer over voor het vereiste koppel."

Klein formaat, groot vermogen
De wielmodules van de EvoRobot zijn uitgerust met DC-motoren uit de serie 3257 … CR of 3272 … CR. Iedere motor is voorzien van een IEF3-encoder en een 38/2 S-tandwielkast. Daarnaast heeft ook iedere motor een rem om de wielen snel stop te zetten en stil te houden. Huber Bauer: "Omdat deze micromotoren zo ontzettend sterk zijn, kan de EvoRobot tot wel 200 kilo transporteren. En binnenkort zijn ook zwaardere ladingen mogelijk. Het transport werkt zelfs op hellingen tot vijf graden, en met een snelheid van één meter per seconde."
De productlijn EvoCarrier is ontworpen om kleine lastendragers te transporteren. Binnenin deze AMR is de ruimte zelfs nog beperkter dan in de EvoRobot. De speling tot de grond is minder dan 100 mm. Daarom kan de EvoCarrier zich ook bij bijzonder lage openingen onder de last manoeuvreren. Daarnaast kunnen twee of vier EvoCarriers samenwerken om pallets of complete stellages te verplaatsen. De ontwikkelaars selecteerden voor deze lijn een platte rotormotor als aandrijving: een borstelloze motor van slechts 21 millimeter lengte uit de serie 4221 ... BXT. Hiermee kan de EvoCarrier vloerrollers transporteren met kleine lastendragers tot 120 kilo in totaal. Op de lange termijn denkt Bauer dat de EvoRobot ook over zal stappen op borstelloze motoren, voor nog meer standaardisatie in de wielmodules.
Naast de verhouding tussen volume en vermogen spelen ook onderhoudsvrijheid en betrouwbaarheid in continubedrijf een belangrijke rol in het gebruik van autonome transportvoertuigen. Bauer: "De motoren van FAULHABER voldoen ruimschoots aan onze vereisten op het gebied van levensduur. En het is een voordeel dat de aandrijvingen werken met alle gangbare industriële besturingen. De experts van FAULHABER hebben ons bovendien uitstekend geholpen om de optimale parameterinstellingen te vinden voor serieproductie."
