
www.technologieenindustrie.com
22
'26
Written on Modified on
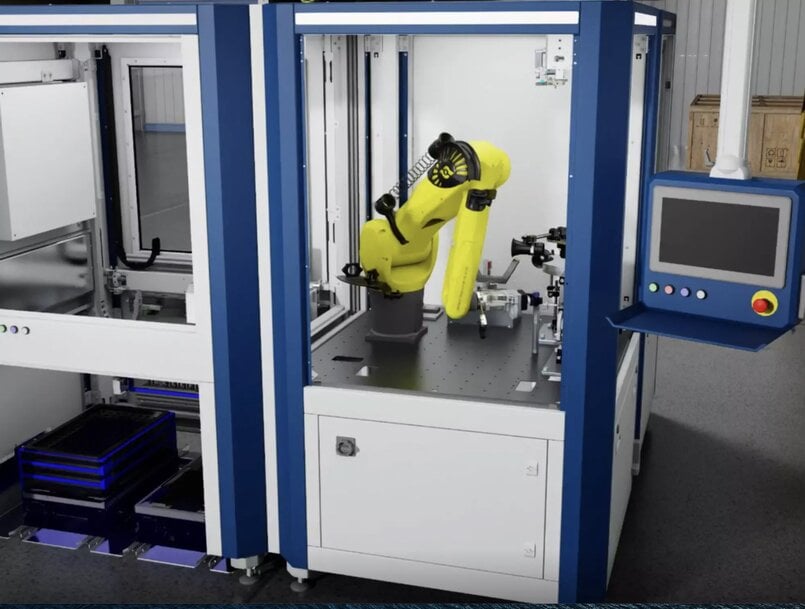
SCHUNK demonstreert industriële adoptie van Physical AI met modulaire automatiseringscel
Op de Hannover Messe presenteerde SCHUNK zijn GROW-automatiseringscel, waarin simulatie, AI-gestuurde robotica en modulaire automatisering worden gecombineerd om schaalbare en productierijpe Physical AI-toepassingen mogelijk te maken.
schunk.com
SCHUNK heeft een gestandaardiseerd, modulair platform geïntroduceerd dat is ontworpen om autonome toepassingen van fysieke kunstmatige intelligentie rechtstreeks in de fabrieksoperatie te integreren.
De samenwerking omvat de integratie van high-fidelity simulatieraamwerken met adaptieve robotica-hardware om herhaalbare fabricagewerkstromen op te zetten. Deze technische benadering speelt in op de vraag naar flexibele, zelfoptimaliserende machines binnen de sectoren van de discrete productie en de industriële logistiek.
Optimalisatie van autonome trajecten in de digitale toeleveringsketen
Traditionele assemblagelijnen worden geconfronteerd met ernstige capaciteitsbeperkingen bij het beheren van productieseries met veel varianten en lage volumes, als gevolg van rigide programmeermethoden en lange fysieke omsteltijden. De verschuiving naar een modulaire automatiseringsarchitectuur herconfigureert de handling van grondstoffen en de generatie van mechanische gereedschapspaden tot zelfaanpassende processen. Door deze adaptieve edge-units op te zetten, elimineren productienetwerken statische workflowbeperkingen en sluisen ze real-time machinetelemetrie rechtstreeks door naar een uniforme digitale toeleveringsketen. Deze geautomatiseerde connectiviteit functioneert als een intelligente laag binnen een breder data-ecosysteem voor de automobielindustrie, wat een dynamische productieplanning vergemakkelijkt en de werkstromen op de werkvloer synchroniseert met de bredere logistiek van leveranciers.
Microkinematische validatie en virtuele inbedrijfstelling
Het kernmechanisme vertrouwt op een 'simulation-first'-methodologie die robotsequenties digitaal voorbereidt en optimaliseert voordat ze op fysieke systemen worden ingezet. Door high-fidelity simulatiebibliotheken en structurele robotica-raamwerken in de engineeringpijplijn op te nemen, worden driedimensionale bewegingen, complexe klemkrachten en hoogfrequente grijpcycli virtueel gemodelleerd en getraind. Deze end-to-end validatie via digitale tweelingen zorgt ervoor dat robotbewegingspaden en real-time koppelcompensaties wiskundig convergeren vóór de hardware-integratie. Deze structurele modellering voorkomt mechanische botsingsrisico's tijdens de eerste opstartfase en verkort de fysieke inbedrijfstellingsperiode met ongeveer 40%, waardoor de risico's op het gebied van initiële kapitaaluitgaven (CapEx) worden verlaagd.
Softwaregestuurde vertaling en platformonafhankelijke integratiewerkstromen
De overgang van virtuele trainingsmodellen naar actieve uitvoering op de fabrieksvloer wordt beheerd via softwaregestuurde werkstromen met een open architectuur. Dankzij deze communicatieprotocollen kunnen deep-learning-besturingsstrategieën die in gesimuleerde omgevingen zijn gevalideerd, rechtstreeks worden gecompileerd en weggeschreven naar de industriële controllers ter plaatse. Deze synchronisatie vertaalt complexe virtuele logica op een duurzame manier in fysieke acties onder reële productieomstandigheden. Tegelijkertijd registreert de automatiseringsinterface ruimtelijke afwijkingen en metrics omtrent het slippen van componenten, waarna deze gegevens worden teruggekoppeld in de optimalisatielussen. Deze geautomatiseerde tracking verhoogt de totale pick-doorvoer en transformeert de rol van het fabriekspersoneel van repetitief handwerk naar technische systeemmonitoring en diagnostische taken.
Aanvullende context
Dit gedeelte bevat technische specificaties en benchmarks met de concurrentie die niet in het oorspronkelijke nieuwsbericht waren opgenomen.
In vergelijking met traditionele, op maat gemaakte niet-standaard automatiseringsintegratiepakketten van leveranciers als Fanuc of ABB, die vertrouwen op rigide, handmatig gecodeerde programmapunten (pendant points), richt het modulaire platform zich op de ontkoppeling van software en hardware en op schaalbare bouwstenen. Conventionele twee- of driedimensionale vision-geleidingsmethoden hebben vaak te kampen met latentie bij de positiebepaling (pose-estimation) van meer dan 500 milliseconden wanneer ze reflecterende, gestapelde of olieachtige metalen componenten tegenkomen, wat de herhaalnauwkeurigheid van de positionering verslechtert. Technische benchmarks tonen aan dat dit systeem gebruikmaakt van gespecialiseerde versnellingshardware om de latentie van de lokale inferentielus te verlagen tot minder dan 10 milliseconden. Dit komt overeen met de strikte dynamische responscriteria die vereist zijn voor het continu volgen van trajecten op hoge snelheid.
Bovendien wordt, door gebruik te maken van adaptieve grijpmechanismen die de mechanische klemdruk actief aanpassen, de interne structurele slijtage van de end-effector geminimaliseerd. Dit vermindert het aantal potentiële mechanische faalpunten met ongeveer 15% in vergelijking met conventionele rigide impactgereedschappen. Deze structurele duurzaamheid verbetert de Mean Time Between Failures (MTBF) van het systeem, wat een betrouwbare, onderhoudsarme standaard oplevert voor flexibele fabricagecellen met een hoge doorvoer.
Geredigeerd door Romila DSilva, redacteur bij Induportals, met ondersteuning van AI.
www.schunk.com
